

































































型号 | FRC5000-L005 | FRC5000-L108 | FRC5000-L006 | FRC5000-Q006 |
描述 | 单舵轮激光导航控制器 | 四舵轮专用控制器 | 双舵轮激光导航控制器 | 双舵轮专用控制器 |
尺寸 W x H x D(mm) | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 | 166.5 x 110.5 x 40 |
防护等级 | IP65 | IP65 | IP65 | IP65 |
温度 | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ | -25℃~+70℃ |
湿度 | 10%~90%RH 无凝露 | 10%~90%RH 无凝露 | 10%~90%RH 无凝露 | 10%~90%RH 无凝露 |
EMC | 工业三级 | 工业三级 | 工业三级 | 工业三级 |
IMU | √ | √ | √ | √ |
差速底盘运动模型 | × | × | × | × |
舵轮底盘运动模型 | 单舵轮 | 四舵轮 | 双舵轮 | 双舵轮 |
其他底盘运动模型 | × | 四差速/舵轮总成底盘 | × | × |
激光导航 | √ | √ | √ | × |
二维码导航 | × | √ | 选配 | √ |
磁导航 | 选配 | × | × | × |
其他导航方式 | × | 混合导航 | × | × |
导航定位精度 | ±5mm | 激光自然导航±10mm,激光有反导航±5mm,二维码导航±10mm | ±5mm | ±10mm |
角度控制精度 | ±0.5° | ±1° | ±0.5° | ±1° |
地图面积 | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ | ≤400000㎡ |
CAN(通道) | 3 | 3 | 3 | 3 |
RS485/RS232/RS422(通道) | 4/1/× | 4/1/× | 4/1/× | 4/1/× |
复用通信口(通道) | 1(可配CAN/RS485/RS232) | 1(可配CAN/RS485/RS232) | 1(可配CAN/RS485/RS232) | 1(可配CAN/RS485/RS232) |
PWM(通道) | 4 | 4 | 4 | 4 |
AI/AO | × | × | × | × |
DI/DO/DIO | 20/12/4 | 20/12/4 | 20/12/4 | 20/12/4 |
编码器(通道) | 2 | 2 | 2 | 2 |
音频接口 | 1 | 1 | 1 | 1 |
有线工业以太网 | 3 | 3 | 3 | 3 |
无线调试接口 | √ | √ | √ | √ |
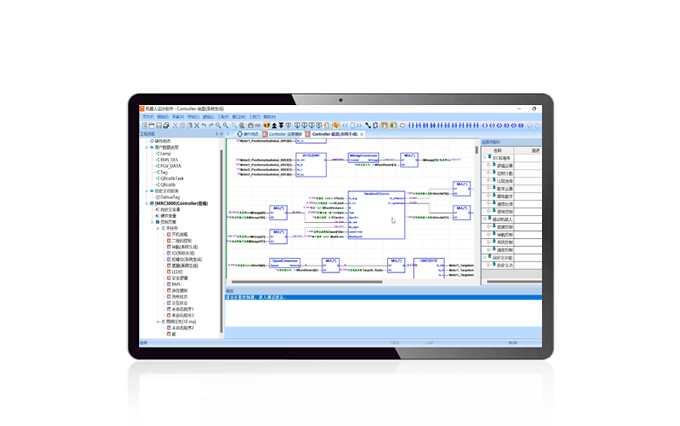
机器人设计软件 | √ | √ | √ | √ |
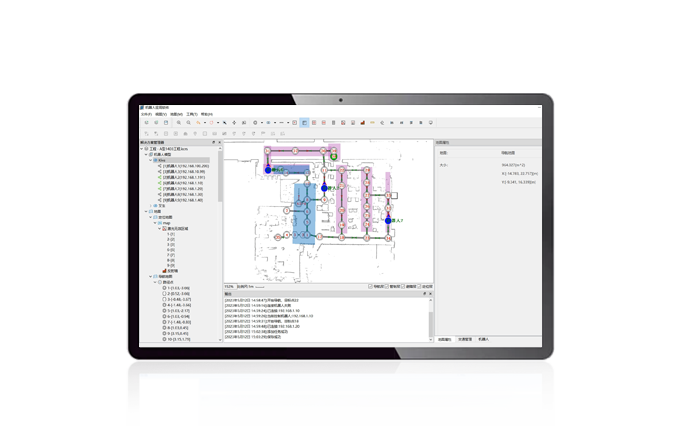
机器人应用软件 | √ | √ | √ | √ |
机器人监控及调度软件 | 选配 | 选配 | 选配 | 选配 |
扩展功能 | 栈板识别、视觉定位、标志物二次定位、导航激光辅助避障、3D视觉避障 | 栈板识别、标志物二次定位、3D视觉避障 | 栈板识别、视觉定位、标志物二次定位、导航激光辅助避障、3D视觉避障 | 栈板识别、视觉定位、标志物二次定位、3D视觉避障 |


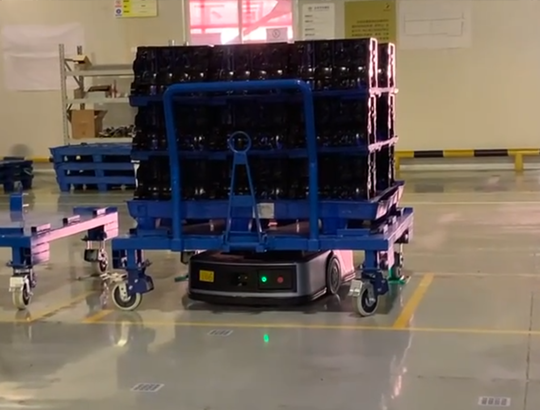
叉式搬运移动机器人整体解决方案,根据移动机器人的整车功能,主要分为控制系统、导航传感、底盘驱动、执行机构、安全检测、交互模块、通讯模块、供电单元、选增功能等九大单元模块构成。
