-
 ユニバーサルコントローラ
ユニバーサルコントローラ フォーク移動ロボットコントローラー
フォーク移動ロボットコントローラー 差動駆動移動ロボットコントローラ
差動駆動移動ロボットコントローラ QRコードナビゲーション用コントローラ
QRコードナビゲーション用コントローラ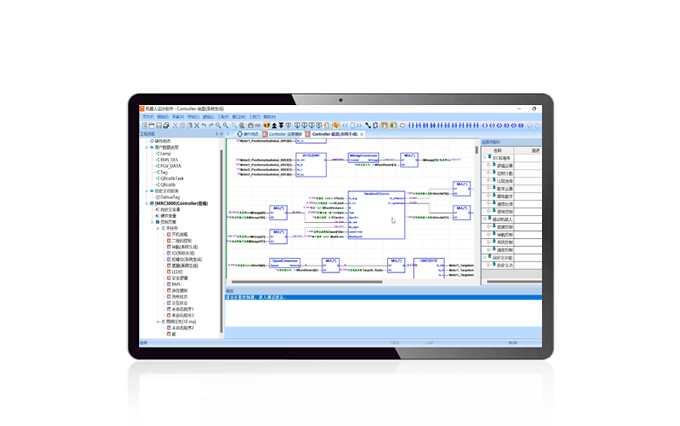 ロボット設計ソフト
ロボット設計ソフト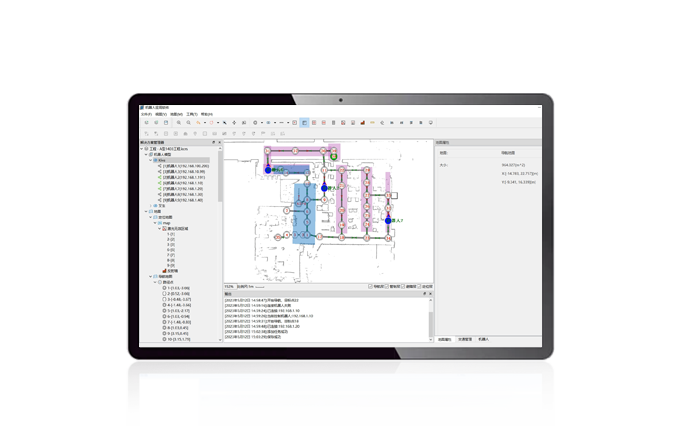 ロボット工学アプリケーション
ロボット工学アプリケーション ロボット配車および監視ソフトウェア
ロボット配車および監視ソフトウェア ロボット管理プラットフォーム(クラウド)
ロボット管理プラットフォーム(クラウド) ドライブ・コントロール・キット
ドライブ・コントロール・キット 2Dレーザー距離計
2Dレーザー距離計 ビジョンセンサー
ビジョンセンサー ビジョンモジュール
ビジョンモジュール 磁気ナビゲーション キット
磁気ナビゲーション キット AGV/AMR ワイヤードハンドオペレーター
AGV/AMR ワイヤードハンドオペレーター 産業車両用有線ハンドヘルドオペレータ
産業車両用有線ハンドヘルドオペレータ ワイヤレスハンディターミナル
ワイヤレスハンディターミナル I/O モジュール
I/O モジュール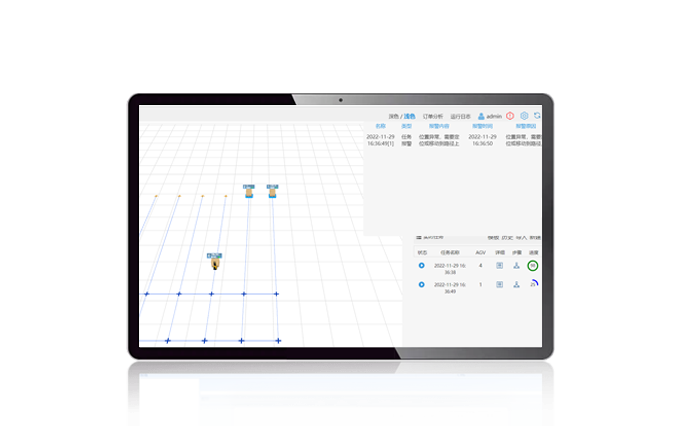 ロボット・オンライン・シミュレーション・プラットフォーム
ロボット・オンライン・シミュレーション・プラットフォーム ツールチェーンソフトウェア
ツールチェーンソフトウェア
















































リーチフォークリフト/前進式フォークリフト
フォークリフト移動ロボットは、高さの異なるパレット積みされた荷物の積み込み、積み下ろし、段積み、搬送などの自動作業に適しており、専用車両を追加することなく、パレット積みされた荷物の入港に必要な一連の吊り上げ、積み込み、搬送を完了できます。工場作業場における物流の無人化・無人化を実現します。
フォークリフト移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプションの9つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。
フォークリフト移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプションの9つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。

低床型
低床型移動ロボットは、パレットや棚などの車両をリフトやリフトで運び、搬送された資材や棚を指定の場所まで素早くスムーズに搬送し、倉庫作業場での棚展開や仕分け、統合などの作業を完了し、自動的にドッキング・移植する仕組みです。 、昇降機構、倉庫、その他の設備はすべて無人です。
潜在的なリフティングとハンドリングの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーション センサー、シャーシ ドライブ、アクチュエーター、安全検出、インタラクティブ モジュール、通信モジュール、電源ユニット、オプションの 9 つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。
潜在的なリフティングとハンドリングの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーション センサー、シャーシ ドライブ、アクチュエーター、安全検出、インタラクティブ モジュール、通信モジュール、電源ユニット、オプションの 9 つのカテゴリに主に分類されます。機能、ユニットモジュール構成が大きい。

協調(複合)型
協調型(複合型)移動ロボットは、無人ハンドリングシャーシにメカニカルアームを追加して協調型AGVを形成し、移動ロボットと設備機械の間で材料の積み下ろしを完了することができ、また、機械上の視覚センサーを使用することもできます。材料を加工するアーム、包括的なテスト。
協調型(複合型)移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能に分けられます。 9つの主要なユニットモジュールで構成されています。
協調型(複合型)移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能に分けられます。 9つの主要なユニットモジュールで構成されています。

コンベア型
コンベア型移動ロボットは、無人ハンドリングシャーシにローラー機構を付加した生産ラインドッキングロボットで、作業場や倉庫、生産ライン、生産設備間のシームレスな接続を実現します。
コンベア型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプション機能に分かれます。大規模なユニットモジュール構成。。
コンベア型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、主に制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、オプション機能に分かれます。大規模なユニットモジュール構成。。

ケースハンドリング型
多段箱ロボットは、複数の箱のインテリジェントなピッキング、アクセス、搬送を実現するインテリジェント物流ハンドリング装置です。軌道を使わずに前進、後進、方向転換が可能で、自律航法、アクティブ障害物回避、自動充電などの機能を備えている。
ボックス型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、豊富なユニットモジュール構成とオプション機能を搭載。
ボックス型移動ロボットの全体的なソリューションは、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンサー、シャーシドライブ、アクチュエーター、安全検出、インタラクティブモジュール、通信モジュール、電源ユニット、豊富なユニットモジュール構成とオプション機能を搭載。

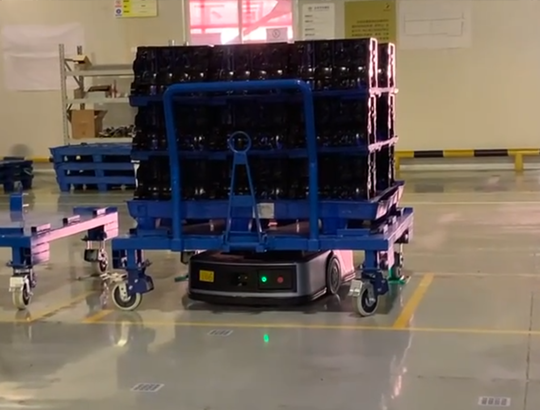
けん引型
けん引移動ロボットは、テールフックを使用して材料トロリーを牽引し、複数の材料トロリーを同時に牽引して、効率的なハンドリングを実現し、輸送効率を向上させることができます。生産現場での資材台車の移動や作業場への資材台車の搬送などに適しています。
けん引移動ロボットの全体的なソリューションは、主に、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。 。
けん引移動ロボットの全体的なソリューションは、主に、移動ロボットの車両機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。 。

重量型
重量移動ロボットはバッテリーまたは内燃エンジンを動力とし、高出力モーター、減速機、ユニバーサル駆動輪を備え、柔軟な操作を実現し、車速調整、揚力補償、車両ブレーキなどの万能機能を備えています。ステアリング、自由経路計画、自動誘導、オンライン急速充電、複数車両グループ化連携などの機能を備え、インテリジェント車両を集中配車および管理できます。
大型移動ロボットの全体的なソリューションは、主に、車両の機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。移動ロボット。
大型移動ロボットの全体的なソリューションは、主に、車両の機能に応じて、制御システム、ナビゲーションセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、およびオプションの追加機能などのユニットモジュールに分かれています。移動ロボット。

背負い型
背負い型移動ロボットはリュックサックを背負って材料や運搬物などの対象物を所定の場所に運搬し、工場や生産ラインでの無人運転を実現する。
背負い型移動ロボットの全体的なソリューションは、移動ロボットの車両全体の機能に応じて、主に制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。
背負い型移動ロボットの全体的なソリューションは、移動ロボットの車両全体の機能に応じて、主に制御システム、ナビゲーションとセンシング、シャーシ駆動、安全検出、インタラクションモジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットモジュールに分かれています。

駐車型
駐車ロボットは、利用者が駐車プラットフォームに乗り入れた自動車を自動的かつ正確に駐車スペースまで運び、自動車をピックアップする際には、利用者のピックアップスペースまで自動車を自動的に運ぶ。 駐車ロボットは駐車スペースを節約するだけでなく、車両のアクセス時間を短縮し、快適で便利な駐車サービスを提供する。
駐車移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと感知、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、およびオプション機能から構成されるユニットモジュールに分かれています。
駐車移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと感知、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、およびオプション機能から構成されるユニットモジュールに分かれています。

屋外型
屋外移動ロボットは屋外でハンドリングを行い、一般的に四輪四駆のシャーシを使用する。
屋外移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと検出、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットとモジュールに分かれています。
屋外移動ロボットの全体的なソリューションは、主に移動ロボットの車両全体の機能に応じて、制御システム、ナビゲーションと検出、シャーシ駆動、安全検出、相互作用モジュール、通信モジュール、電源ユニット、オプション機能およびその他のユニットとモジュールに分かれています。

倉庫物流
無人物流倉庫は、物流システムの効率化の必要性から始まりました。オンラインショッピングの台頭により、物流業界は徐々に中国経済の主要な原動力となり、多くの雇用者を吸収してきました。人がモノを届ける物流業界は競争の激しいレッドオーシャン期に突入しており、物流効率を高め、人件費を削減し、いかに早く商品を消費者に届けるかが大手物流企業の焦点となっている。<br />
移動ロボットが普及した現在、倉庫物流とは一般に社内倉庫を指し、生産ライン近くの倉庫や集中保管倉庫を指します。
もっと詳しく見る

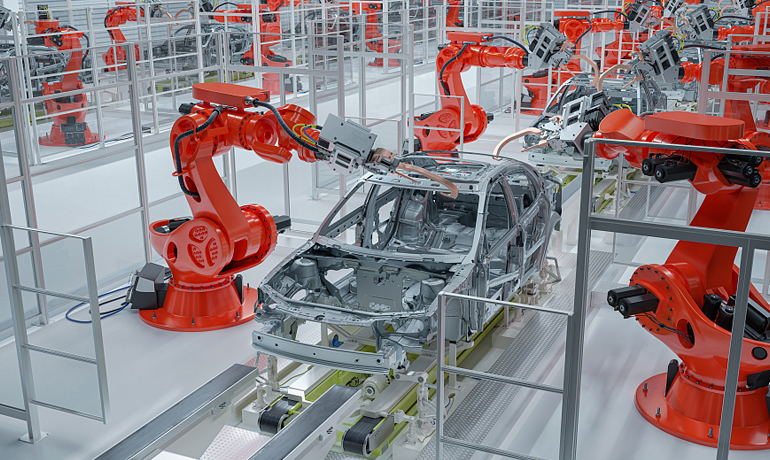
自動車製造
自動車製造は世界最大の規模と生産額を誇る重要な産業の一つであり、世界の製造業のかなりの部分を占めています。消費の高度化と市場の需要の多様化に伴い、自動車メーカーは熾烈な競争の下で市場の需要を満たすために、より高い効率とより柔軟な生産方法を必要としています。<br />
自動車製造業界がアップグレードと革新を続ける中、モバイルロボット (AGV/AMR) は、効率性、柔軟性、安全性などの独自の技術的利点により、自動車製造の生産ラインでますます重要な役割を果たしています。
もっと詳しく見る
半導体
半導体産業は現代のハイテク産業であり、新興の戦略産業であり、現代の情報技術、電子技術、通信技術、情報化などの産業の基盤の一つです。中国政府は「中国集積回路産業発展計画」と「中国人工知能発展計画」を相次いで策定し、半導体や人工知能などの産業の発展を支援し、より多くの政策支援と発展機会を提供することを明確に提案している。半導体産業。<br />
この業界では、時は金なりであり、生産性が鍵となります。したがって、半導体業界では移動ロボット (AGV/AMR) の応用が特に重要です。
もっと詳しく見る

リチウム電池産業
比較的成熟した先進的な電池として、リチウム電池は軽量で大容量の蓄電能力があるため、広く使用されています。リチウム電池の世界最大の生産国および消費国である中国は、世界最大の電気自動車市場でもある。「カーボンニュートラル」の目標が提案されており、リチウムイオン電池技術は電気自動車、エネルギー貯蔵システム、スマートフォンに炭素を供給できる電力網などの重要な応用分野をサポートすることで、国の炭素排出量とエネルギー消費を削減することもできます。<br />
リチウム電池産業とインテリジェント製造技術の統合は、市場競争リスクに対抗する能力を強化し、膨大な投資機会と市場需要を引き起こし、リチウム電池産業の変革とアップグレードを促進し、リチウム電池産業の持続可能な発展に新たな推進力を注入することができます。新しいエネルギー産業。
もっと詳しく見る

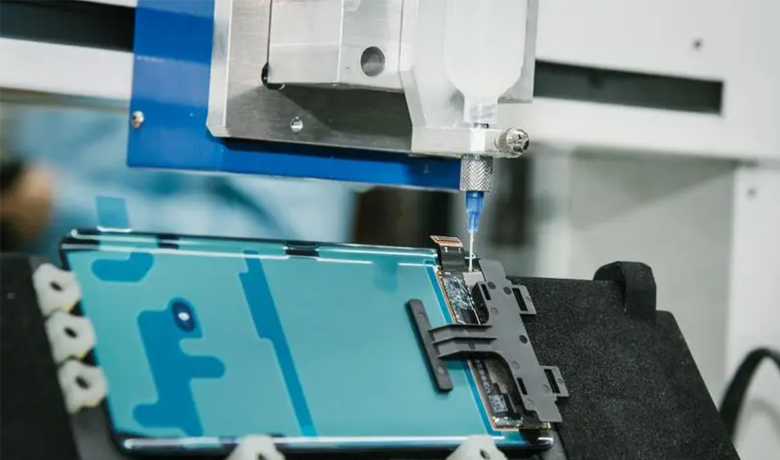
3Cエレクトロニクス
中国は世界の生産能力の7割を占める3C製造大国であり、3C製品の加工・組立工場のほとんどが中国にあります。現在、3C製造業では自動化が進み、移動ロボットやロボットアームなどの産業用ロボットが広く普及しています。<br />
もっと詳しく見る
軍事製造
軍事産業とは、軍事物資の備蓄、武器および装備品の生産、軍備資材の生産、軍需製品の開発に関連する産業の合計を指します。兵器製造および軍事資材備蓄の分野の特性 (機密性、安全性、可燃性、爆発性、複雑なプロセス フロー) により、情報セキュリティと個人の安全に対する要件は非常に高くなります。<br />
軍需産業における従来の生産、輸送、倉庫における危険要因を減らすために、移動ロボットは軍需産業の製造および輸送プロセスの安全性を確保するために労働力を支援するために使用されています。 「デジタル化と情報化」という新たな目標により、軍事産業における物流インテリジェント製品の需要は今後も高まり続けると予想され、インテリジェント輸送製品として、移動ロボットはインテリジェント生産における重要なリンクとなります。
もっと詳しく見る





© 2023 Zhejiang Kecong Control Technology Co., Ltd. 公式ウェブサイト | 移動ロボットに人間のサービスを提供しましょう 浙江省公共ネットワークセキュリティ番号 33052302000842 浙ICP备19001570号-1 wzhfykl.com
テクニカルサポート:ネットワーク