-
Mobile robot control system Industrial vehicle control system Low-speed driverless control system PLC
 Universal mobile robot controller
Universal mobile robot controller Forklift robot controller
Forklift robot controller Differential mobile robot controller
Differential mobile robot controller Barcode navigation dedicated controller
Barcode navigation dedicated controller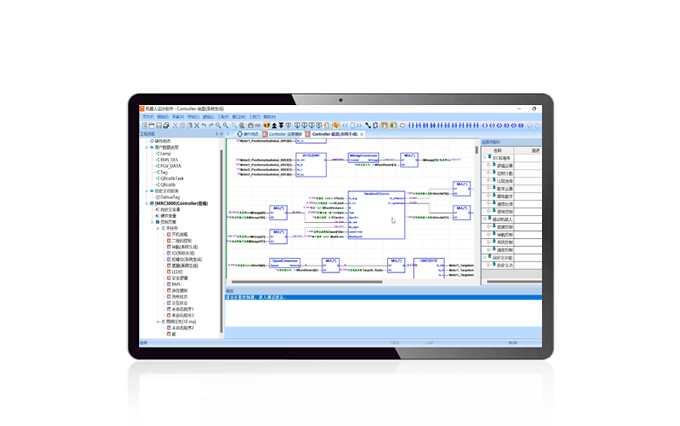 Robot Design software
Robot Design software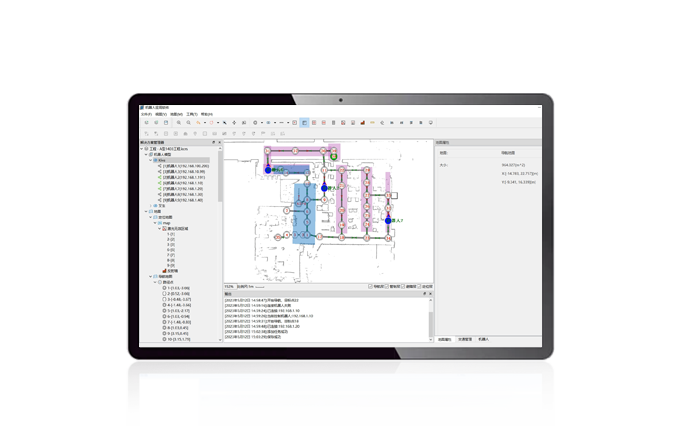 Implementation software
Implementation software Fleet management software
Fleet management software Robot management (cloud)
Robot management (cloud) Motor&servo kit
Motor&servo kit 2D Laser rangefinder
2D Laser rangefinder Vision sensor
Vision sensor Vision-based obstacle avoidance module
Vision-based obstacle avoidance module Magnetic navigation kit
Magnetic navigation kit AGV/AMR wired hand-held remoter
AGV/AMR wired hand-held remoter Industrial vehicle wired hand-held remoter
Industrial vehicle wired hand-held remoter Wireless hand-held terminal
Wireless hand-held terminal I/O module
I/O module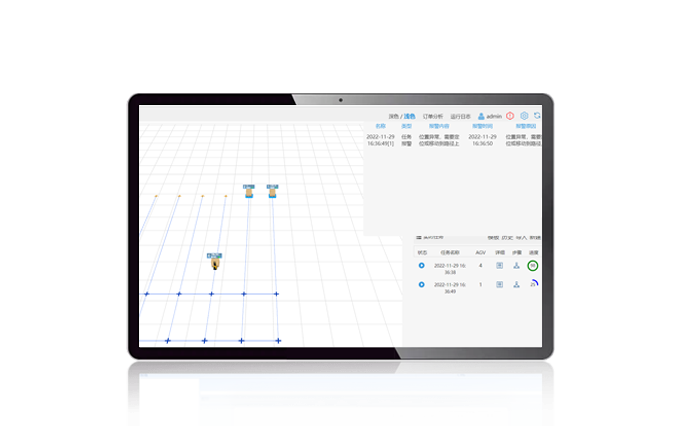 Simulator
Simulator Tools
Tools -
 Forklift handling mobile robot
Forklift handling mobile robot Reach mobile robots
Reach mobile robots SLIM
SLIM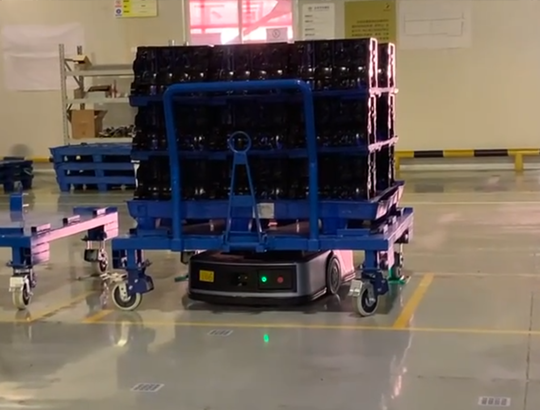 Jacking robot
Jacking robot Cooperation robot
Cooperation robot Roller mobile robot
Roller mobile robot Towing mobile robot
Towing mobile robot Platform handling robot
Platform handling robot Heavy-load robot
Heavy-load robot Outdoor loading mobile robot
Outdoor loading mobile robot Pick robot
Pick robot Parking robot
Parking robot Agricultural robot
Agricultural robot Driverless Road Roller robot
Driverless Road Roller robot Driverless Sanitation vehicle
Driverless Sanitation vehicle



















KC complete nearly 100 million RMB of series A + round of financing.
Continues to Lead the Mobile Robot Control System Market
More














Fork type
Fork mobile robots are suitable for loading, unloading, stacking, and transporting pallet goods of different heights. It can complete a series of actions, such as lifting, carrying, and transporting palletized goods without additional special carriers, to realize less labour force and automatic logistics on the factory.
The overall solution of fork-type handling mobile robot is mainly divided into nine modules according to the whole vehicle function of the mobile robot, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions.
The overall solution of fork-type handling mobile robot is mainly divided into nine modules according to the whole vehicle function of the mobile robot, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions.

Jacking type
The Jacking-type mobile robot carries pallets, shelves, and other carriers by jacking, lifts the transported materials and shelves, transports them quickly to the designated position, and completes the shelf deployment, sorting, integration, and other work in the storage plant workshop. It automatically connects with the transplantation mechanism, lifting and lowering mechanism, and the equipment of the standing library, to achieve unmanned operation.
The overall solution of jacking and transporting type, according to the whole vehicle function of mobile robot, is mainly divided into the control system, navigation, and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, optional additional functions, such as the composition of the nine major unit modules.
The overall solution of jacking and transporting type, according to the whole vehicle function of mobile robot, is mainly divided into the control system, navigation, and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, optional additional functions, such as the composition of the nine major unit modules.

Cooperation type
Cooperation mobile robots in the unmanned handling chassis based on the addition of a robotic arm can complete the material in the mobile robot and equipment between the machine loading and unloading work, but also through the vision sensor on the arm of the material all-round detection.
The cooperation mobile robot's overall solution, according to the mobile robot vehicle function, is mainly divided into the control system, navigation sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions, such as nine unit module composition.
The cooperation mobile robot's overall solution, according to the mobile robot vehicle function, is mainly divided into the control system, navigation sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and optional functions, such as nine unit module composition.

Roller type
The roller mobile robot is to add a roller mechanism based on unmanned handling chassis to form a production line docking robot, which can achieve a seamless connection between workshop and warehouse, production line and production line, and production equipment and production equipment.
The overall solution of the roller mobile robot is mainly divided into nine unit modules, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and add functions, etc., according to the function of the whole vehicle of the mobile robot.
The overall solution of the roller mobile robot is mainly divided into nine unit modules, such as control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, and add functions, etc., according to the function of the whole vehicle of the mobile robot.

Pick type
Pick robot is an intelligent logistics handling equipment, which can realize intelligent picking, accessing and handling of multiple pallet. Without the use of any track, it can move forward, backward, turn, with autonomous navigation, active obstacle avoidance and automatic charging and other functions.
According to the whole vehicle function of the mobile robot, the overall solution of the bin-type mobile robot is mainly divided into control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, add functions and other nine unit modules.
According to the whole vehicle function of the mobile robot, the overall solution of the bin-type mobile robot is mainly divided into control system, navigation and sensing, chassis drive, actuator, safety detection, interaction module, communication module, power supply unit, add functions and other nine unit modules.

Towing type
The towing mobile robot adopts a tail hook to tow material trolleys, which can tow several material trolleys at the same time to achieve efficient handling and improve transport efficiency. It is suitable for the transfer of material trolleys in the production workshop and the delivery of material trolleys to the workstations.
The overall solution of a traction mobile robot is mainly divided into control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add functions, and other units and modules according to the function of the whole vehicle of the mobile robot.
The overall solution of a traction mobile robot is mainly divided into control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add functions, and other units and modules according to the function of the whole vehicle of the mobile robot.

Heavy-load type
The heavy-duty mobile robot is a kind of intelligent vehicle powered by a battery or an internal combustion engine, equipped with high-power motors, gearboxes, and universal drive wheels to achieve flexible operation, with speed adjustment, lift compensation, vehicle braking, omnidirectional steering, free path planning, automatic guidance, online fast charging, multi-vehicle grouping linkage and other functions, and at the same time, can be centrally managed by the centralized dispatching.
The overall solution for heavy-duty mobile robots is mainly divided into the control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add functions, and other modules according to the function of the whole vehicle of the mobile robot.
The overall solution for heavy-duty mobile robots is mainly divided into the control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add functions, and other modules according to the function of the whole vehicle of the mobile robot.

Platform handling type
The platform handling mobile robot transports the target goods (materials and carriers) to the designated place using backpacking to achieve unmanned operation in the factory and production line.
The overall solution of a platform handling mobile robot is mainly divided into the control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add function, and other unit modules according to the whole vehicle function of the mobile robot.
The overall solution of a platform handling mobile robot is mainly divided into the control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add function, and other unit modules according to the whole vehicle function of the mobile robot.

Parking type
The parking robot will automatically and precisely carry the car driven into the parking platform by the user to the parking space, and then automatically carry the car to the user's pick-up space when picking up the car. The parking robot not only saves the parking space, but also shortens the vehicle access time, providing a comfortable and convenient parking service.
The overall solution of parking mobile robot is mainly divided into unit modules consisting of control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, and optional functions according to the whole vehicle function of the mobile robot.
The overall solution of parking mobile robot is mainly divided into unit modules consisting of control system, navigation and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, and optional functions according to the whole vehicle function of the mobile robot.

Outdoor type
Outdoor mobile robots carry out handling outdoors, generally using 4W4D chassis.
The overall solution of outdoor mobile robots is mainly divided into the control system, navigation, and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add functions, and other units and modules according to the function of the whole vehicle of the mobile robot.
The overall solution of outdoor mobile robots is mainly divided into the control system, navigation, and sensing, chassis drive, safety detection, interaction module, communication module, power supply unit, add functions, and other units and modules according to the function of the whole vehicle of the mobile robot.

Quick links
With the mission of "Let mobile robots service human beings", KC is a robotics company that provides a reliable and flexible control system for mobile robots. KC's solution is based on an autonomous navigation and control wzhfykl.com sensing and reasoning technology, we further achieve human-machine cooperation and human-machine collaboration.
Warehouse Logistics
Unmanned logistics warehousing, initially originated from the need to improve the efficiency of the logistics system. With the emergence of online shopping, the logistics industry has gradually become a major driver of China's economy and offered a large number of job opportunities. Since the logistics industry, where someone can deliver goods, has entered a highly competitive period, how to improve logistics efficiency, reduce personnel costs, and make products reach consumers faster has become the focus of attention of major logistics companies.<br />
Nowadays, mobile robots are widely used, warehousing logistics refers to internal warehousing in general, generally referring to the production line side of the warehouse and centralized storage warehouses.
More

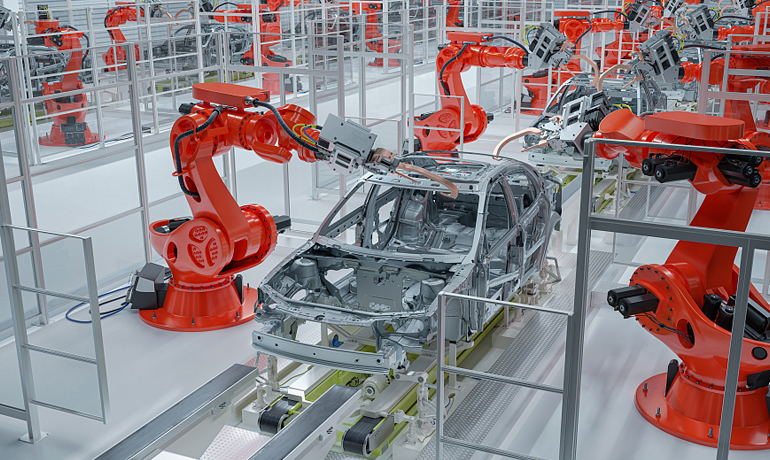
Automotive
Automotive is one of the world's largest and most important industries with the highest output value and occupies a considerable proportion of the global manufacturing industry. With the upgrading of consumption and diversification of market demand, the automotive industry needs more efficient and flexible production methods to meet the market demand under fierce competition.<br />
Along with the continuous upgrading and innovation of the automotive industry, mobile robots (AGV/AMR) play a more and more important role in the automotive manufacturing production line with their unique technical advantages of high efficiency, flexibility, and safety.
More
Semi-conductor
The semiconductor industry is a modern high-tech industry and an emerging strategic industry, which is one of the foundations of modern information technology, electronic technology, communication technology, information technology, and other industries. China's government has formulated the China Integrated Circuit Industry Development Plan and the China Artificial Intelligence Development Plan, which clearly promote the development of semiconductor and artificial intelligence and other industries, providing more policy support and development opportunities for the semiconductor industry.<br />
In this industry, time is money while productivity is key. Therefore, the application of mobile robots (AGV/AMR) is particularly important in the semiconductor industry.
More

Lithium industry
With the feature of mature and advanced, lithium-ion batteries are widely used because of their lightweight and high storage capacity. China, as the world's largest producer and consumer of lithium batteries, is also the world's largest electric vehicle market. With the goal of "carbon neutrality", lithium-ion battery technology can provide carbon neutrality for electric vehicles, energy storage systems, smart grids, and other important applications, and also reduce the country's carbon emissions and energy consumption.<br />
The mutual integration of the lithium industry and intelligent manufacturing technology can enhance the ability to resist the risk of market competition, triggering huge investment opportunities and market demand, promoting the transformation and upgrading of the lithium industry, and injecting new impetus for the sustainable development of the new energy industry.
More

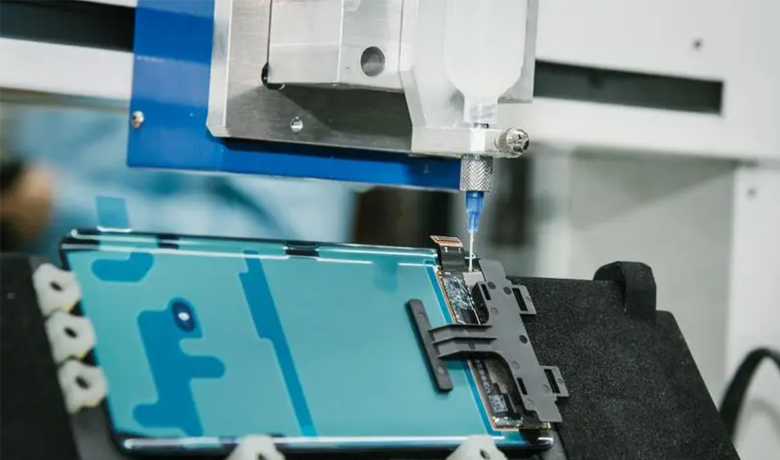
Electronics
China is a large Electronic manufacturing country and occupies 70% of the global production capacity, which means Electronic product processing and assembly factories are overwhelmingly in China. Nowadays, the 3C manufacturing industry is undergoing automation upgrading, mobile robots, robotic arms, and other industrial robots have been applied on a large scale.<br />
More
Military manufacturing
The military industry includes military stockpiles, weapons and equipment production, armaments production, and the development of military products. Due to the characteristics of the field of weapons manufacturing and military stocks (confidentiality, security, flammability, explosivity, complex processes), the information security and personal safety requirements are particularly high.<br />
To reduce the military industry insecurity in traditional production, transport, and storage by using mobile robots to ensure that the military industry manufacturing process and the safety of the transport process. The new goal of "digitalization, informatization" makes the military industry's demand for logistics intelligent products continue to rise in the future, and mobile robots as intelligent transport products are an important part of intelligent production.
More

KC introduces Golden Ant investment to complete series A + round of financing
Recently, KC introduces Golden Ant investment to complete nearly 100 million RMB of series A + round of financing.
2024-05-28

Exhibition Highlights
KC in 2024 ITES had a complete success, the entire exhibition focus on high-end equipment industry and advanced manufacturing technology industry of the two core, around the "intelligent manufacturing" exhibition content to create a professional display and efficient communication platform.
2024-03-29

Zhejiang Kecong Completes Series A Financing of Nearly 100 Million RMB: Continues to Lead the Mobile
Recently, Zhejiang Kecong completed the series A round of nearly 100 million yuan financing by Yuanjing Capital.
2024-01-16

© 2023 Zhejiang KeCong Control Technology Co., Ltd .All rights reserved. |Let mobile robot service human beings Zhejiang police No.33052302000842
wzhfykl.com
support by:Her